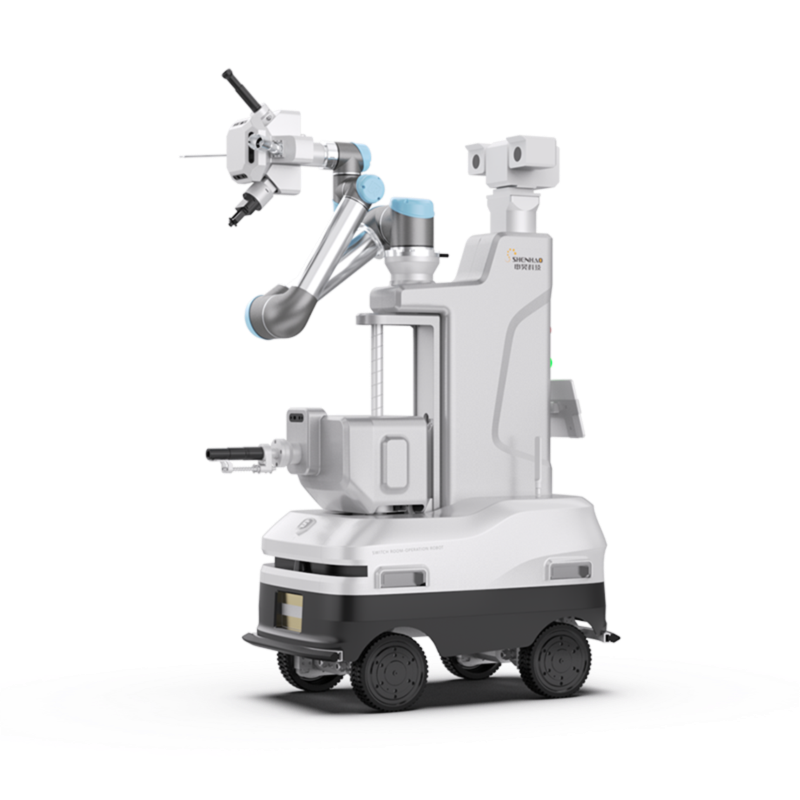
變電(diàn)站巡檢機器人采用(yòng)四驅四轉動力底盤,利用(yòng)激光導航定位技(jì )術、圖像識别技(jì )術、高精(jīng)測溫技(jì )術等,實現設備狀态全面感知、信息高效處理(lǐ),可(kě)廣泛應用(yòng)于室外環境的各類設備巡視作(zuò)業。可(kě)針對室外設備外觀缺陷、表計讀數、開關位置、設備測溫、聲音采集等進行巡檢,輔助或代替人工(gōng)完成設備巡檢工(gōng)作(zuò),提高巡檢效率和質(zhì)量。
SHENGHAO

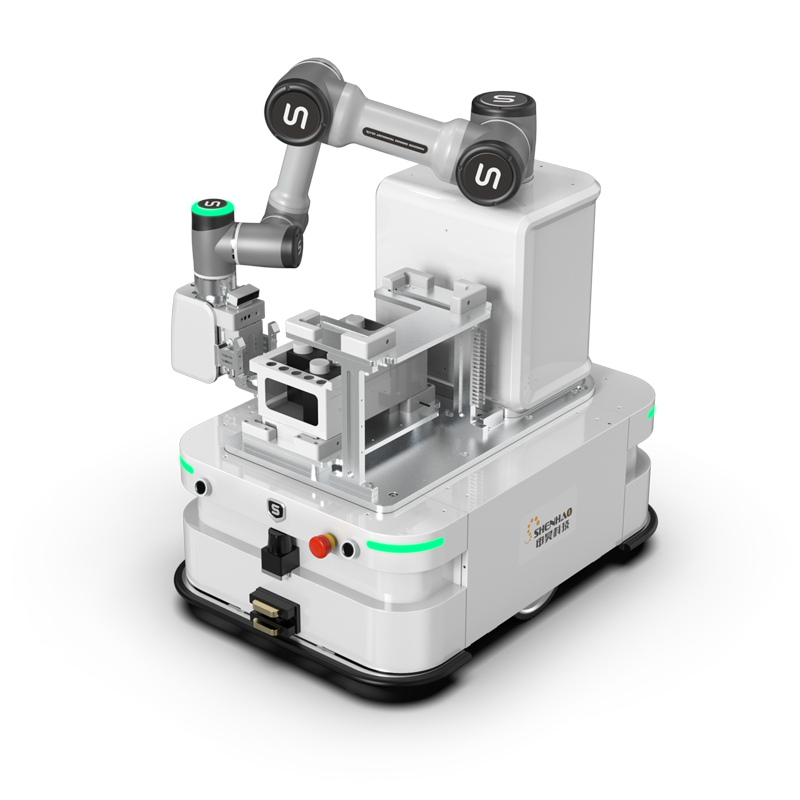
模塊化四驅四轉高性能(néng)運動底盤
模塊化設計,四驅四轉高性能(néng)運動底盤,通過性強;
3D激光高精(jīng)度定位
3D激光+慣導定位導航算法實現±1cm高精(jīng)度定位;
重定位;
多(duō)傳感器感知安(ān)全防護
自主避障繞障、測坑防護、安(ān)全觸邊、緊急停止;
實時監控、智能(néng)運維
巡檢數據可(kě)實現遠(yuǎn)程集控管理(lǐ),實現無人值守目标;
大數據分(fēn)析與雲計算,精(jīng)準診斷故障。
主要功能(néng)
智能(néng)巡檢
機器人自檢
狀态異常告警
脫機獨立工(gōng)作(zuò)
音視頻遠(yuǎn)傳
微氣象采集

技(jì )術參數
爬坡角度
>20°
涉水深度
>15cm
越障高度
>7cm
定位精(jīng)度
±10mm
續航時間
>8h
紅外測溫精(jīng)度
±2℃或量程的2%